News.
Greenroom Robotics - Safe software architectures for Trusted Maritime Autonomy

Uninhabited Surface Vessels (USVs) are becoming increasingly common, with varying levels of autonomy challenging operators and regulators globally. Software for USVs needs to be explainable, predictable, and reliable so that humans have assurances for safety and trust.
In addition to the fundamental need for trust and safety, the qualities of explainability, predictability and reliability are also proving essential for regulatory and legal compliance. Regulators need to understand and have confidence in a system for assurance and certification.

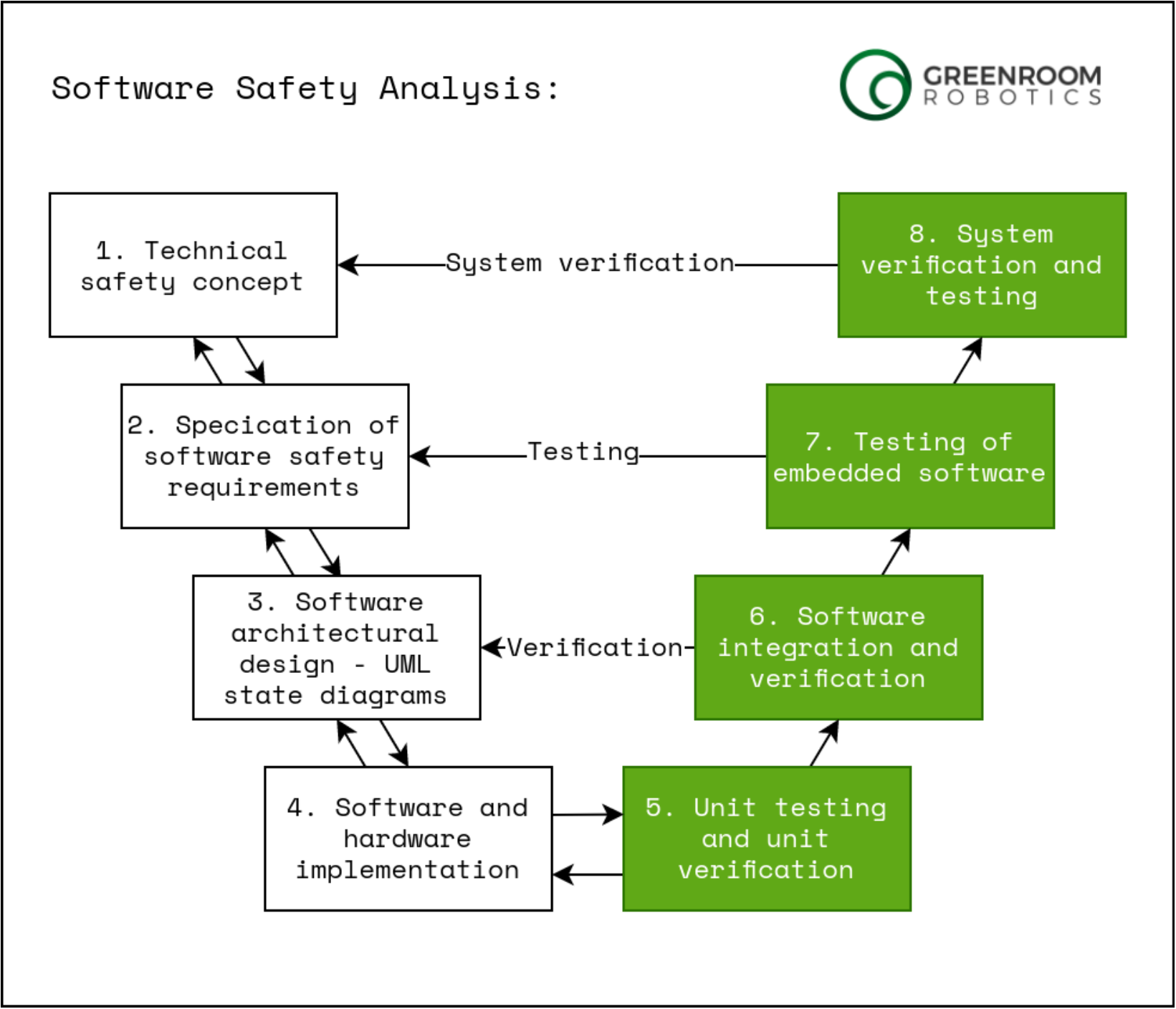
At Greenroom, safety isn’t just a component of our software, it is the foundation. Greenroom implements state machines to manage the underlying modes for Remote and Autonomous Systems. State Machines are designed to support the programming of multi-component, complex robots. This approach is purpose-made for highly controlled and safety critical applications, giving nil room for unplanned actions, whilst also providing a highly explainable system.
Additional safety tooling automatically generates Unified Modelling Language (UML) diagrams for all control software each time a change or new feature is implemented. This lets us visualise, to clients, users and regulators, the state of the software and the various systems in real time, or in summary. The resulting system ensures user understanding and safety, while leveraging the benefits of the latest breakthroughs in autonomy research.
By implementing best-practice architecture, supported by comprehensive test and evaluation frameworks, Greenroom can create deep, strong and reliable foundations for trustworthy autonomous systems.
If you have are in the maritime sector, and looking to enhance your remote and autonomous capability, reach out to team@greenroomrobotics.com.